Introduction to Mechatronics Engineering Lab teaches students about robotics, by using the VEX robotics platform, and gives hands on examples of how the different aspects of STEM are all used in the field of robotics. This lab also introduces the VEX robotics CLAWBOT, and uses it as a platform to introduce students to the different subsystems within the VEX platform and how they interact together by using digital and analog sensors. Students put this knowledge into practice as they follow step-by-step directions to build their first robot, program it using remote and autonomous control and ultimately participate in an in house VEX robotics competition.
Hardware VEX robotic Kits
Software RobotC SolidWorks
Location: Engineering Technology Center, Building Q Room Q-121
Programming for Mechatronics
Introduction
Programming for Mechatronics Lab covers programming topics relevant for Mechatronics
Engineering, using tools such as C++, Arduino, and Python. The focus is towards acquiring
analog, digital, and camera sensor data, motor control, pneumatics, etc. The lab also
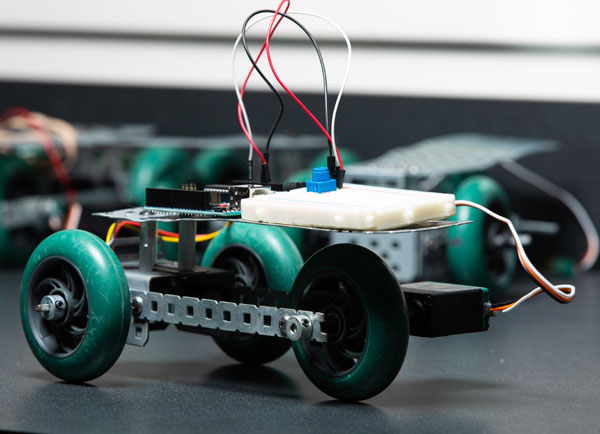
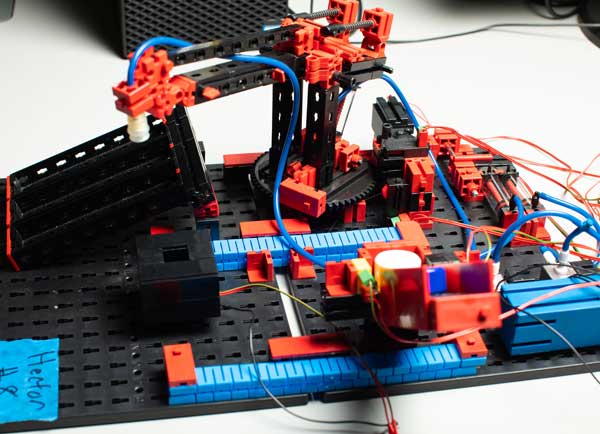
has a color sorting robot system, PI controlled minicars, DC motor control with Arduino,
2D tracking, serial communication, and image processing for students learning.
Hardware Color sorting robots Minicars
Software Anduino IDE Python C++
Location: Engineering Technology Center, Building Q Room Q-242
Device Control and Simulation of Mobile Robots
Introduction
Device Control and Simulation of Mobile Robots Lab teaches fundamental skills for the mechatronics engineer.
Topics Include:
Creating electronics circuits using diode, LEDs and Transistors.
A mobile robot programming using the Robot Operating System (ROS).
Perform robot kinematics with principles of obstacle avoidance.
Sensors and actuators, especially pneumatics.
DC motors programming and interfacing with the AVR microcontroller.
Hardware ROS bots Pneumatics Test Bench
Software Robot Operating System
Location: Engineering Technology Center, Building Q, Room Q-242
Fluid Power
Introduction
Fluid Power is the Robotics and Mechatronics course equivalent to Fluid Mechanics.
Fluid Power has a heavier focus in motors and pumps which are more useful to graduates
in our field. The lab focuses heavily on understanding and creating fluid simulations
and diagrams. Students will have the chance to examine hands on equipment such as
the FESTO Manufacturing Production system and to create fluid simulations from it
as well as work with and control the FESTO Process Control Training Bench. Students
will show mastery by being able to create many different fluid control simulations
using a variety of components.
Hardware FESTO Manufacturing Production System(including Fanuc Robot) FESTO Process Control Training Bench
Software Fluidsim Labview
Location: Engineering Technology Center, Building Q, Room Q-118 and Q-110
Feedback Control
Introduction
This is a laboratory course designed to complement the modeling and feedback controls topics also covered in MTRE3610. Feedback Control (PID Control), Model Identification, MATLAB/Simulink Modeling, and Process Control are studied and analyzed using simulations and physical experiments.
Hardware Couple Water Tank System DC Motors
Software QUARC- Realtime Control Software MatLab/Simulink
Location: Building G Room G-129
Instrumentation and Controls
Introduction
Instruments and Controls teaches student the fundamentals of Programmable Logic Controllers
(PLCs). It uses a program called Totally Integrated Automation (TIA) portal to program
the Siemens PLC to do various tasks to demonstrate knowledge and understanding. Students
will have hands on learning and programming of PLCs as well as demonstrations and
hands on trouble shooting of the larger FANUC Robotic arms with fully integrated Vanderlande
Conveyor System. Students will demonstrate their mastery of their PLC use with a culminating
project of fully programming the MiniFESTO Pick and Place system.
Hardware Siemens PLC controllers MiniFesto Pick and place system FESTO Manufactiromg Production System (Including Fanuc Robot) FESTO Process Control Training Bench FANUC M-16iB/20 Robots and Vanderlande Conveyor System fully integrated Integrated unit using Misubishi robot
Location: Engineering Technology Center, Building Q, Room Q-110 Room Q-118 Dale Heatherington Mechatronics Lab
Robotics Analysis and Synthesis
Introduction
The “Robotics Analysis and Synthesis” course introduces coordinate transformations, kinematics/dynamics modeling, control system design, and path/trajectory planning of robotic arms. Three state-of-the-art robotic arms, the UR5e robotic arms, provide students a versatile and safe robotic platform to explore and validate the robotics knowledge learned from the classroom. The UR5e arm has 6 joints and a 2-finger robotic gripper, which is adaptable for varying levels of expertise to test and perform simple or complex grasping and manipulation tasks. In addition, the course also utilizes ROS (Robot Operating System) to implement simulations and control of a robotic arm.
Hardware
The UR5e robotic arms and the Kinova arm
Software ROS (Robot Operating System), MatLab
Location: Engineering Technology Center, Building Q Room Q-121, Q242
Dale Heatherington Mechatronics Lab
The Dale Heatherington Mechatronics Lab offers a hands-on learning environment in
the exploration of advanced education, research and service supporting the creation
of the new mechatronic products and processes.
The lab has a FESTO Reconfigurable Mechatronics System (RMS) to provide hands-on experiences implementing Siemens Programmable Logic Controllers (PLC’s).
Combining FESTO and Siemens technologies it is possible to investigate not only intelligent
features, but also implementing more flexible, agile and reconfigurable mechatronic
system applied to manufacturing automation. Major equipment includes the IMIS palletizing
system (twin FANUC M-410iB robots with Vanderlande Conveyors and Siemens PLC integration)
and one Fanuc Robot with industrial capacity and capabilities to simulate relevant
industrial projects that integrates four stations demonstrating the full automation
of manufacturing and assembly.
The FESTO RMS includes an Automatic Guided Vehicle (AGV) system represented by the central conveyor. The AGV system synchronizes the manufacturing cell using different pallets to transport and connect the products in the four stations. Each station includes different types of robots implementing specific routines representing the manufacture and assembly of different products. The FESTO equipment uses a pneumatic system and all operations are programmed by using Siemens PLC’s controllers.
Location: Engineering Technology Center, Building Q Room Q-118